











Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

1 、 Tổng quan về dự án
Kế hoạch này nhằm mục đích tùy chỉnh một hệ thống nền tảng thực hành giáo dục robot để đáp ứng nhu cầu giảng dạy của phòng thí nghiệm đại học về tầm nhìn máy và kiểm soát lực lượng. Hệ thống này sẽ được phát triển xung quanh robot hợp tác Aubo-I5, camera công nghiệp Hikvision, camera 3D và cảm biến lực lực sáu trục để đạt được các chức năng như điều khiển robot, kiểm tra trực quan và lắp ráp điều khiển lực và cung cấp phần mềm máy tính trên nguồn mở để mở rộng chức năng sau này.

2 、 Thành phần phần cứng hệ thống
Robot: Áp dụng robot hợp tác Aubo-I5, nó có các đặc điểm của độ chính xác cao và an toàn cao, và phù hợp cho các kịch bản giảng dạy.
Camera: Bao gồm máy ảnh công nghiệp Hikvision và camera 3D, được sử dụng để có được thông tin hình ảnh của phôi, hỗ trợ xử lý hình ảnh truyền thống và phát hiện hình ảnh học sâu.
Cảm biến lực lượng thứ sáu: Kunwei (KWR75) hoặc các thương hiệu khác được chọn để theo dõi thời gian thực về thông tin tương tác lực giữa bộ tạo đầu cuối robot và phôi.
3 、 Thiết kế phần mềm máy tính trên
Các chức năng cơ bản:
Kiểm soát robot: Thực hiện các chức năng như kết nối, ngắt kết nối, kiểm soát khớp hoặc tư thế của robot.
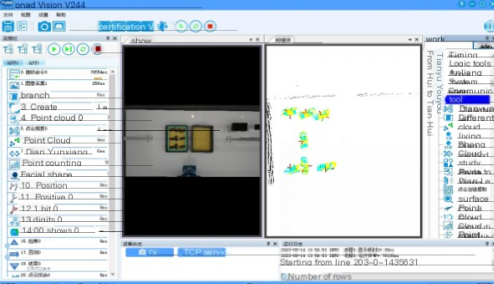
Kiểm soát camera: Thực hiện các chức năng như kết nối camera, ngắt kết nối và thu nhận hình ảnh.
Hiển thị trạng thái: Hiển thị thời gian thực của khớp và tư thế của robot, các tham số trạng thái của cảm biến lực sáu trục và hình ảnh được chụp bởi máy ảnh.
Các tính năng độc quyền:
Lắp ráp lỗ trục: Thông qua hoạt động của máy tính trên, kết hợp với công nghệ kiểm tra trực quan và điều khiển lực, chức năng lắp ráp tự động của lỗ trục.
Thiết kế giao diện: Giao diện trên máy tính trên phải súc tích, rõ ràng và dễ vận hành. Giao diện nên bao gồm các nút chức năng cơ bản và vùng hiển thị trạng thái, cũng như cung cấp quyền truy cập vào chức năng lắp ráp lỗ trục.
4 、 Thực hiện chức năng
Tầm nhìn máy:
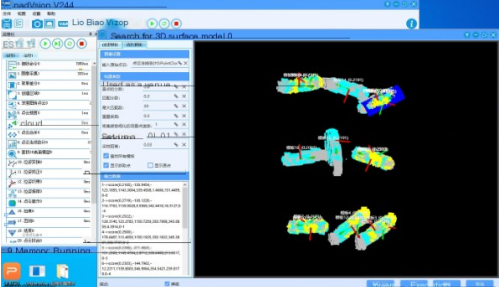
Phát hiện hình ảnh truyền thống: Sử dụng kết hợp mẫu, phù hợp vòng tròn, phù hợp cạnh và các phương pháp khác để định vị và nhận dạng phôi, hỗ trợ nhận dạng mã vạch, mã QR, số ký tự, cũng như tính toán diện tích thang độ xám và số lượng tấm.
Phát hiện hình ảnh học sâu: Nhận dạng tự động và nội địa hóa của phôi thông qua các thuật toán học sâu. Mặc dù việc học sâu vẫn đòi hỏi chú thích thủ công hình ảnh, chúng tôi sẽ cố gắng cải thiện hiệu quả đào tạo và độ chính xác nhận biết, giảm dần khối lượng công việc chú thích.
Hội đồng kiểm soát điện:
Kết hợp dữ liệu từ các cảm biến lực sáu chiều, đạt được điều khiển tương tác lực giữa bộ tạo đầu robot và phôi hoàn toàn, và lắp ráp chính xác lỗ trục.
5 Rủi ro dự án và các biện pháp phản hồi
Nguy cơ hợp tác với các cảm biến lực sáu trục: do thiếu hợp tác với các cảm biến lực sáu trục, có thể có một số khó khăn kỹ thuật và sự không chắc chắn. Chúng tôi sẽ sắp xếp một nhóm kỹ thuật chuyên nghiệp để giải quyết vấn đề và đảm bảo tích hợp trơn tru và hoạt động ổn định của các cảm biến.
Rủi ro học tập sâu phát hiện hình ảnh: Phát hiện hình ảnh học sâu đòi hỏi một mức độ chính xác và hiệu quả nhất định, trong khi đáp ứng yêu cầu của một lần đào tạo nhấp chuột. Chúng tôi sẽ tiếp tục tối ưu hóa các thuật toán học sâu để cải thiện độ chính xác và hiệu quả nhận biết, đồng thời khám phá các cách để thực hiện một lần đào tạo nhấp chuột.
6 、 Bài đăng mở rộng và chuyển đổi cảnh
Phần mềm máy tính trên áp dụng thiết kế nguồn mở, tạo điều kiện cho việc mở rộng chức năng và chuyển đổi cảnh khi cần thiết trong việc giảng dạy sau này. Ví dụ, cảnh lắp ráp của các lỗ trục có thể được chuyển sang các nhiệm vụ như kết nối các bánh răng tốt hoặc nhận dạng và nắm bắt các phôi khác. Bằng cách sửa đổi và gỡ lỗi các chương trình nguồn mở, thật dễ dàng để đạt được hoạt động của robot và các chức năng phát hiện trực quan trong các kịch bản khác nhau.
Kế hoạch này tích hợp các tài nguyên phần cứng như robot, máy ảnh và các cảm biến lực sáu trục, kết hợp với thiết kế phần mềm máy tính trên nguồn mở, để cung cấp một môi trường giảng dạy phong phú và dễ mở rộng cho nền tảng thực hành giáo dục robot. Thông qua việc sử dụng các nền tảng thực tế, sinh viên có thể có được sự hiểu biết sâu sắc hơn về các nguyên tắc và ứng dụng của công nghệ điều khiển tầm nhìn và lực lượng, và cải thiện khả năng thực tế và sáng tạo của họ.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
