











Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

Tổng quan dự án
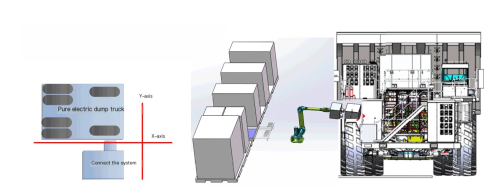
Dự án này nhằm mục đích thiết kế một hệ thống sạc tự động xe tải tự động hiệu quả và ổn định để đáp ứng nhu cầu sạc của khách hàng trong điều kiện sản xuất trong nhà ở khu vực Shanxi. Hệ thống cần đạt được hoạt động không người lái và kiểm soát các phương tiện kỹ thuật, chỉ hoàn thành các chức năng sạc tự động và tự động của các điểm A và B để đáp ứng các yêu cầu hoạt động liên tục của dây chuyền sản xuất.
Thành phần hệ thống
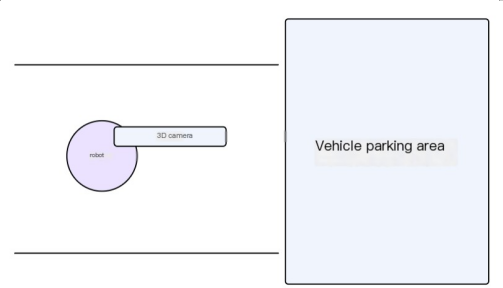
Hệ thống định vị trực quan: Sử dụng máy ảnh chính xác cao và thuật toán trực quan để đạt được vị trí chính xác của cổng sạc trên xe tải đổ. Hệ thống hình ảnh cần có khả năng chống lại bụi và ánh sáng mặt trời trực tiếp, đảm bảo hoạt động ổn định trong các môi trường trong nhà khác nhau.
Robot và cơ chế đẩy súng: robot công nghiệp với nhịp cánh tay từ 3m trở lên được chọn, được trang bị các cơ chế đẩy súng được thiết kế đặc biệt. Cơ chế đẩy súng nên có đủ lực đẩy và chính xác để đảm bảo rằng súng sạc có thể được chèn chính xác và nhanh chóng được chèn vào cổng sạc.
Hệ thống sạc: Được trang bị thiết bị sạc công suất cao 3 megawatt, đảm bảo rằng xe tải có thể được sạc đầy trong một thời gian ngắn và cải thiện hiệu quả sản xuất.
Hệ thống điều khiển: Thông qua một hệ thống điều khiển tích hợp, có thể điều khiển chính xác định vị trực quan, chuyển động robot và quá trình sạc. Hệ thống điều khiển nên có các đặc điểm tự động hóa và thông minh cao, và có thể đạt được sạc tự động không người lái.
Quy trình làm việc
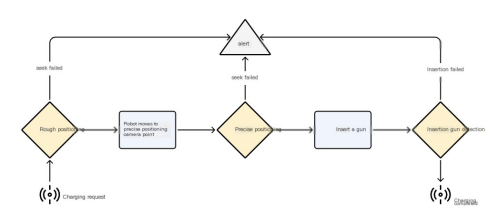
Vị trí tự bán xe tải: Xác định và xác định vị trí cổng sạc của xe tải thông qua hệ thống định vị trực quan.
Robot Motion: Hệ thống điều khiển hướng dẫn robot di chuyển gần cổng sạc của xe tải đổ dựa trên kết quả định vị trực quan.
Đẩy súng chèn: robot được trang bị cơ chế súng đẩy, chính xác và nhanh chóng chèn súng sạc vào cổng sạc của xe tải.
Quá trình sạc: Hệ thống sạc bắt đầu sạc xe tải cho đến khi đạt đến mức năng lượng đặt trước hoặc thời gian.
Robot sơ tán: Sau khi hoàn thành việc sạc, robot sẽ sơ tán cổng sạc và chờ đợi sự xuất hiện của chiếc xe tải tự đổ tiếp theo.
Công nghệ chính
Công nghệ định vị trực quan: Bằng cách sử dụng các thuật toán như học sâu, độ chính xác và tính ổn định của các hệ thống định vị trực quan có thể được cải thiện.
Công nghệ điều khiển robot: Tối ưu hóa quỹ đạo chuyển động robot và tốc độ để cải thiện hiệu quả sạc.
Thiết kế cơ chế đẩy súng: đảm bảo rằng cơ chế đẩy súng có đủ lực đẩy và chính xác, đồng thời xem xét tính nhỏ gọn cấu trúc và độ tin cậy của nó.
Phản ứng rủi ro
Bảo vệ môi trường trong nhà: Đảm bảo môi trường trong nhà sạch sẽ và khô ráo, giảm tác động của bụi và ánh sáng mặt trời trực tiếp lên hệ thống định vị thị giác.
Bảo trì phần cứng: Thường xuyên duy trì và bảo trì phần cứng như robot và hệ thống định vị trực quan để đảm bảo hoạt động bình thường của chúng.
Đánh giá chuyên nghiệp: Mời các chuyên gia đánh giá và tối ưu hóa cơ chế đẩy súng, hệ thống sạc, v.v., để đảm bảo sự an toàn và tính khả thi của giải pháp.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
