










Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

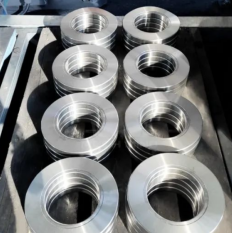
Với sự phát triển nhanh chóng của ngành sản xuất, nhu cầu tự động hóa và sản xuất thông minh đang tăng lên từng ngày. Đặc biệt trong các kịch bản sản xuất có hiệu quả cao và hiệu quả cao, các phương pháp cho ăn truyền thống không còn đủ để đáp ứng nhu cầu sản xuất. Sự xuất hiện của công nghệ tầm nhìn 3D cung cấp một giải pháp mới cho việc cho ăn chính xác các phôi gia công phức tạp như vòng quán tính.
Nguyên tắc cơ bản của công nghệ tầm nhìn 3D là xử lý và phân tích thông tin không gian ba chiều của các đối tượng thông qua máy tính và đạt được các hoạt động như nhận dạng đối tượng, phát hiện, theo dõi và đo lường. Trong việc áp dụng việc cho ăn chính xác các vòng quán tính, công nghệ tầm nhìn 3D ghi lại thông tin không gian ba chiều của vòng quán tính, cung cấp cho robot vị trí và tư thế nắm chính xác, do đó đạt được việc cho ăn chính xác vòng quán tính.
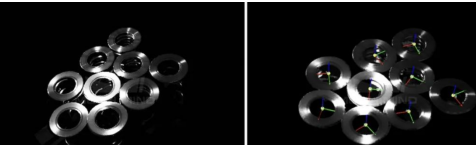
Về mặt thuật toán hình ảnh, công nghệ tầm nhìn 3D áp dụng các thuật toán tiên tiến để đối phó với các tình huống phức tạp như phản xạ bề mặt và độ che phủ phim của các vòng quán tính. Bằng cách tối ưu hóa các thuật toán, hệ thống có thể tạo dữ liệu đám mây điểm rõ ràng và chính xác, cung cấp một nền tảng vững chắc để nhận dạng và chụp tiếp theo.
Về lựa chọn camera, các hệ thống tầm nhìn 3D cần chọn máy ảnh có độ phân giải cao, trường nhìn lớn và độ sâu trường lớn. Loại máy ảnh này có thể ghi lại thông tin hình dạng và kích thước hoàn chỉnh của vòng quán tính, đảm bảo rằng robot có thể tìm thấy chính xác vị trí mục tiêu trong quá trình nắm bắt. Đồng thời, đặc điểm của độ sâu lớn của trường cho phép máy ảnh duy trì các hiệu ứng hình ảnh rõ ràng ở các khoảng cách khác nhau, cải thiện hơn nữa độ chính xác của việc cho ăn.
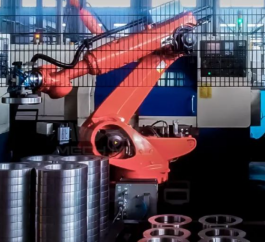
Ngoài các thuật toán hình ảnh và lựa chọn camera, công nghệ 3D Vision cũng cần được tích hợp chặt chẽ với các hệ thống điều khiển robot. Bằng cách truyền thông tin không gian ba chiều thời gian thực của vòng quán tính đến hệ thống điều khiển robot, robot có thể xác định chính xác vị trí của vòng quán tính và thực hiện nắm bắt. Trao đổi thông tin thời gian thực này cho phép robot nhanh chóng điều chỉnh các chiến lược nắm bắt của chúng khi đối mặt với các vòng quán tính của các thông số kỹ thuật khác nhau, đạt được sản xuất linh hoạt.
Công nghệ 3D Vision đã đóng một vai trò quan trọng trong quá trình cho ăn chính xác các vòng quán tính. Bằng cách tối ưu hóa các thuật toán hình ảnh, chọn máy ảnh thích hợp và hợp tác chặt chẽ với các hệ thống điều khiển robot, công nghệ này đạt được hiệu quả và chính xác của các vòng quán tính, cải thiện hiệu quả sản xuất và giảm chi phí sản xuất.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
