










Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

Slam còn được gọi là định vị đồng bộ và xây dựng bản đồ, nó là một công nghệ cốt lõi quan trọng trong lĩnh vực công nghệ robot di động. Nó cho phép robot đồng thời ước tính vị trí của riêng chúng và xây dựng các bản đồ môi trường trong các môi trường không xác định, đây là chìa khóa để đạt được điều hướng và thăm dò tự trị.
1 、 Nguyên tắc công nghệ SLAM
Ý tưởng cốt lõi của công nghệ SLAM là đạt được bản thân hóa và bản đồ xây dựng robot trong môi trường không xác định thông qua sự hợp nhất và xử lý dữ liệu cảm biến (như LIDAR, máy ảnh, v.v.). Cụ thể, công nghệ SLAM bao gồm hai phần chính: phép đo phía trước và tối ưu hóa back-end.
1. Đồng hồ đo phía trước: Phần này chủ yếu chịu trách nhiệm ước tính quỹ đạo chuyển động của robot thông qua dữ liệu cảm biến. Nó tính toán sự dịch chuyển tương đối và chuyển đổi thái độ của robot bằng cách phân tích những thay đổi trong dữ liệu cảm biến tại các thời điểm liên tiếp. Các phương pháp phổ biến bao gồm kết hợp tính năng, dòng quang, v.v ... Đầu ra của đồng hồ đo phía trước là ước tính sơ bộ của tư thế của robot, nhưng do nhiễu cảm biến và lỗi tích lũy, các kết quả ước tính này thường không đủ chính xác.
2. Tối ưu hóa phụ trợ: Để cải thiện độ chính xác định vị và tính nhất quán của bản đồ, công nghệ SLAM giới thiệu quá trình tối ưu hóa phụ trợ. Phần này sử dụng dữ liệu lịch sử, phát hiện vòng lặp và các phương pháp khác để hiệu chỉnh và tối ưu hóa kết quả của đồng hồ đo phía trước. Các phương pháp tối ưu hóa thường được sử dụng bao gồm các phương pháp dựa trên bộ lọc (như bộ lọc Kalman mở rộng, bộ lọc hạt, v.v.) và các phương thức tối ưu hóa dựa trên đồ thị. Các phương pháp này có thể giảm hiệu quả các lỗi tích lũy và cải thiện độ chính xác của định vị robot và xây dựng bản đồ.
3 Ứng dụng công nghệ SLAM trong robot di động
Công nghệ SLAM, là một trong những công nghệ cốt lõi của robot di động, có triển vọng ứng dụng rộng rãi trong nhiều lĩnh vực. Dưới đây là một số trường hợp ứng dụng điển hình:
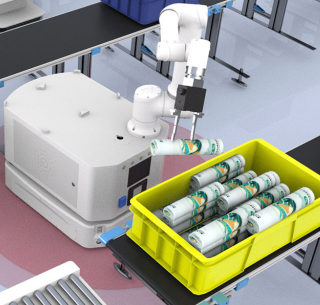
1. Điều hướng tự trị: Trong các lĩnh vực kho lưu trữ và hậu cần, gia công, v.v., robot di động cần phải đạt được các chức năng điều hướng tự trị. Bằng cách sử dụng công nghệ SLAM, robot có thể cảm nhận được môi trường xung quanh trong thời gian thực và xây dựng các bản đồ, do đó lên kế hoạch cho con đường tối ưu và tự chủ hướng đến vị trí mục tiêu. Điều này cải thiện đáng kể hiệu quả làm việc và tự chủ của robot.
2. Khám phá và mô hình hóa môi trường: Trong môi trường không xác định, robot di động có thể sử dụng công nghệ SLAM để khám phá và mô hình hóa môi trường. Bằng cách liên tục thu thập dữ liệu cảm biến và cập nhật thông tin bản đồ.
3. Tương tác máy của con người và các dịch vụ thông minh: Với sự phát triển liên tục của công nghệ trí tuệ nhân tạo, robot di động đang ngày càng được áp dụng trong các lĩnh vực tương tác máy của con người và các dịch vụ thông minh. Bằng cách sử dụng công nghệ SLAM để đạt được định vị chính xác và nhận dạng cảnh, robot có thể cung cấp cho người dùng trải nghiệm dịch vụ thông minh và cá nhân hơn. Ví dụ, hướng dẫn khách hàng trong các trung tâm mua sắm và đi cùng người cao tuổi ở nhà có triển vọng ứng dụng rộng rãi.
Công nghệ SLAM, là một trong những công nghệ cốt lõi của robot di động, cung cấp hỗ trợ mạnh mẽ để đạt được điều hướng tự trị và thăm dò môi trường. Đồng thời, khi đối mặt với các kịch bản ứng dụng phức tạp và luôn thay đổi và liên tục nâng cấp nhu cầu của người dùng, chúng tôi cũng cần tiếp tục chú ý và nghiên cứu các công nghệ và phương pháp SLAM mới để thúc đẩy sự phát triển và áp dụng công nghệ robot di động hơn nữa.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
