










Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

Trong ngành sản xuất hiện đại theo đuổi hiệu quả, độ chính xác và tự động hóa, việc áp dụng công nghệ gia công CNC đang ngày càng trở nên phổ biến. Tuy nhiên, quá trình tải và dỡ các công cụ máy CNC thường trở thành một nút cổ chai hạn chế hiệu quả sản xuất. Để khắc phục giới hạn này, Fuweii Inflent đã đưa ra một giải pháp tải và dỡ tự động CNC Robot CNC, định hình lại quy trình sản xuất và cải thiện hiệu quả và tính linh hoạt của sản xuất.
Tổng quan dự án
Dự án này nhằm mục đích đạt được tải và dỡ nguyên liệu thô trong quá trình gia công CNC, cũng như các quy trình kiểm tra và làm sạch cần thiết. Bằng cách giới thiệu hệ thống cánh tay robot AGV (xe tự động) tổng hợp, kết hợp với máy ảnh quét và máy ảnh tầm nhìn định vị, xử lý vật liệu chính xác và hiệu quả có thể đạt được.
Thành phần hệ thống
Hệ thống cánh tay robot tổng hợp AGV: Bao gồm các thành phần chính như cơ thể AGV, cánh tay robot, camera quét, camera tầm nhìn định vị, v.v.
Hệ thống điều khiển: Chịu trách nhiệm nhận tín hiệu nhiệm vụ từ hệ thống thiết bị ② khu vực, điều khiển hệ thống cánh tay robot AGV để hoàn thành các hành động như lấy vật liệu, xử lý và vị trí.
Hệ thống quét: Bằng cách quét mã QR trên khay vật liệu bằng camera quét, thông tin vật liệu có thể được nhập và theo dõi.
Hệ thống định vị: Sử dụng các camera tầm nhìn định vị để đạt được định vị chính xác và điều hướng các hệ thống cánh tay robot AGV.
Quy trình làm việc
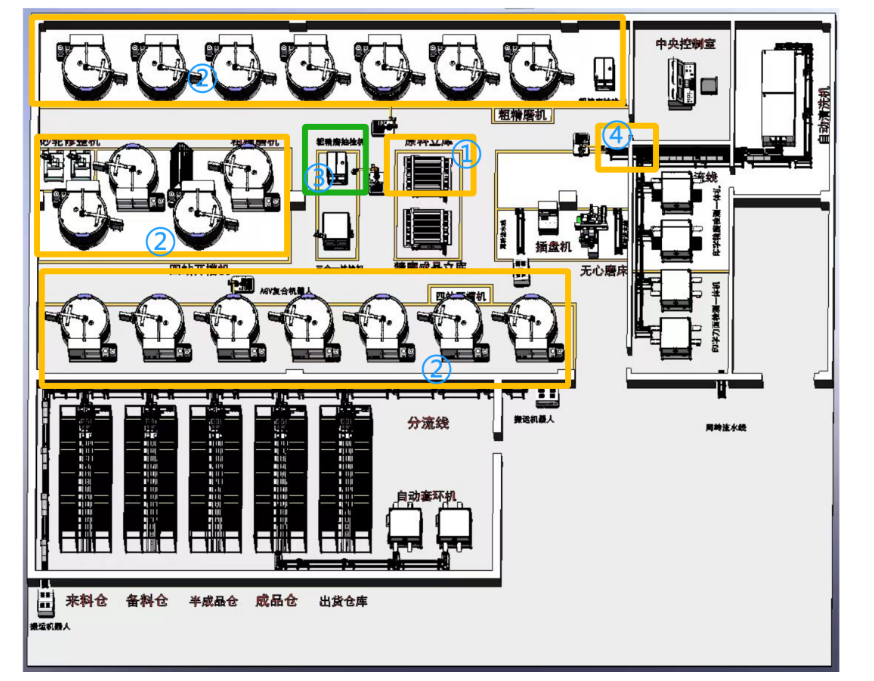
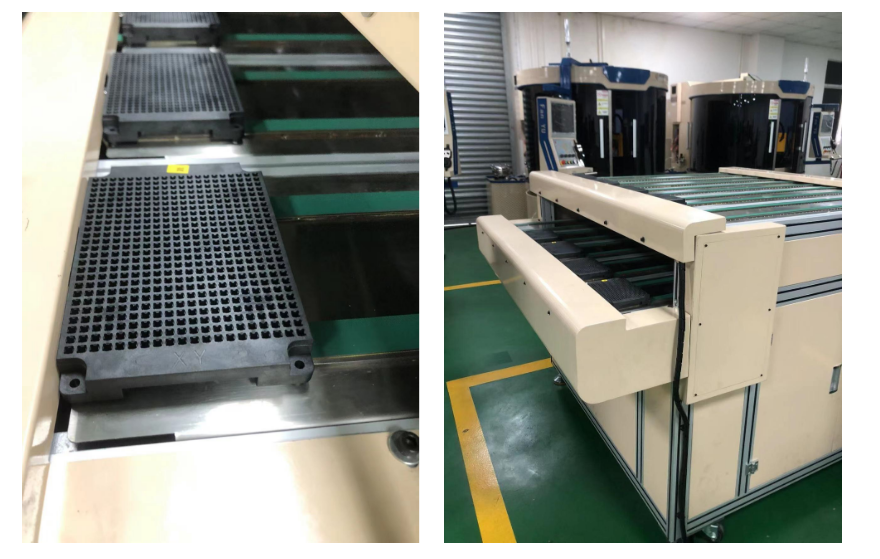
Lấy nguyên liệu thô: Hệ thống cánh tay robot AGV composite đi đến lớp đầu tiên của bộ lưu trữ nguyên liệu thô để lấy các vật liệu được xử lý theo hướng dẫn của hệ thống điều khiển.
Quy trình xử lý: Cung cấp các vật liệu bị bắt cho máy ở khu vực, đặt chúng theo vị trí vị trí bên trong của máy và chờ xử lý.
Quá trình thử nghiệm (tùy chọn): Nếu hệ thống đưa ra yêu cầu thử nghiệm, hãy gửi đĩa khuôn từ vị trí thử nghiệm của máy ở khu vực đến khu vực vị trí của thiết bị thử nghiệm trong khu vực để thử nghiệm. Sau khi hoàn thành kiểm tra, hãy gửi đĩa khuôn trở lại máy ở khu vực.
Quy trình làm sạch: Đặt các vật liệu được xử lý bởi thiết bị trong khu vực ② trên dòng băng tải của máy làm sạch ở khu vực, và công việc làm sạch vật liệu sẽ được tự động hoàn thành bởi dòng băng tải.
Thực hiện kỹ thuật
Hệ thống cánh tay robot AGV Composite: áp dụng công nghệ AGV tiên tiến và công nghệ cánh tay robot để đạt được xử lý vật liệu hiệu quả và chính xác.
Hệ thống quét: Sử dụng camera quét hiệu suất cao để đảm bảo đầu vào chính xác và theo dõi thông tin vật liệu.
Hệ thống định vị: Sử dụng công nghệ định vị trực quan tiên tiến để đạt được định vị chính xác và điều hướng các hệ thống cánh tay robot AGV.
Hệ thống điều khiển: Áp dụng một hệ thống điều khiển đáng tin cậy để đảm bảo hoạt động ổn định và hợp tác hiệu quả của toàn bộ hệ thống.
Ưu điểm hệ thống
Mức độ tự động hóa cao: Nhận ra tải và dỡ tự động, phát hiện và làm sạch nguyên liệu thô trong quy trình gia công CNC, cải thiện hiệu quả sản xuất.
Độ chính xác cao: Bằng cách sử dụng máy ảnh quét và máy ảnh định vị, đầu vào chính xác và định vị chính xác thông tin vật liệu có thể đạt được.
Tính linh hoạt mạnh mẽ: Quy trình làm việc có thể được điều chỉnh linh hoạt theo nhu cầu thực tế để đáp ứng các yêu cầu sản xuất khác nhau.
Tính truy xuất nguồn gốc mạnh mẽ: Bằng cách sử dụng hệ thống quét để theo dõi và theo dõi thông tin vật liệu trong toàn bộ quá trình, mức độ quản lý chất lượng sản phẩm có thể được cải thiện.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
