










Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

Bối cảnh dự án:
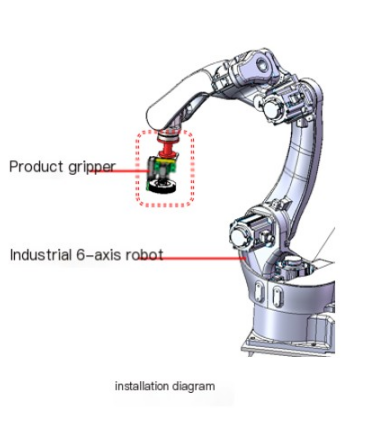
Với sự phát triển nhanh chóng của tự động hóa công nghiệp, ngày càng có nhiều doanh nghiệp đang tìm cách nâng cấp dây chuyền sản xuất của họ thông qua việc giới thiệu công nghệ robot thông minh. Trong số đó, đối với quá trình gỡ lỗi, Fuwei Intleptent sử dụng tầm nhìn 2D để hướng dẫn robot thực hiện chuyển động tròn, điều này không chỉ có thể cải thiện hiệu quả sản xuất mà còn giảm chi phí lao động và cải thiện chất lượng sản phẩm. Giải pháp này nhằm mục đích tạo ra một dây chuyền sản xuất thông minh Deburring rất tự động.

Khó khăn dự án:
Các phôi khác nhau có thể có sự khác biệt về hình dạng, kết cấu, điều kiện ánh sáng, v.v., đòi hỏi độ chính xác định vị trực quan cao;
Robot cần thực hiện các quỹ đạo chuyển động tròn để hoàn thành các tác vụ gỡ lỗi, đòi hỏi hệ thống điều khiển robot phải có thể tính toán và điều chỉnh quỹ đạo chuyển động trong thời gian thực;
Chất lượng của Deburring ảnh hưởng trực tiếp đến chất lượng sản phẩm và hiệu quả dây chuyền sản xuất. Làm thế nào để đạt được một quá trình gỡ lỗi hiệu quả và ổn định, tránh thiệt hại cho phôi hoặc để lại các burrs còn lại, là vấn đề chính cần được giải quyết trong dự án.
Giải pháp:
1. Hoàn thành mối quan hệ chuyển đổi giữa vị trí của sản phẩm trong trường nhìn và vị trí của sản phẩm trong hệ tọa độ robot thông qua "hiệu chuẩn mắt tay";
2. Bằng cách sử dụng hướng dẫn trực quan hoặc các điểm giảng dạy robot, máy ảnh có thể chụp ảnh trên các bề mặt khác nhau của vật thể;
3. Sử dụng các thuật toán hiệu chỉnh biến dạng hình ảnh để đạt được các thay đổi hình ảnh do chụp từ các góc độ khác nhau;
4. Nhận dạng camera 2D của các vị trí lỗ sản phẩm;
5. Tạo bốn điểm tọa độ dựa trên vị trí lỗ;
6. Robot nhận được bốn điểm tọa độ;
7 Robot kết nối bốn điểm theo trình tự thông qua lệnh "chuyển động tròn" để hoàn thành hành trình lỗ tròn;

Giá trị cốt lõi:
Giải pháp này tích hợp một hệ thống tầm nhìn 2D, robot chính xác cao, các công cụ gỡ lỗi và hệ thống điều khiển thông minh để đạt được sự công nhận chính xác, định vị và gỡ lỗi tự động của phôi. Robot tự động lập kế hoạch và thực hiện một quỹ đạo chuyển động tròn dựa trên thông tin vị trí và tư thế của phôi được cung cấp bởi hệ thống tầm nhìn 2D để hoàn thành nhiệm vụ gỡ lỗi.
Việc nâng cấp tự động hóa quá trình gỡ lỗi đã đạt được bằng cách tích hợp hệ thống tầm nhìn 2D, hệ thống robot và hệ thống điều khiển thông minh. Giải pháp này không chỉ cải thiện hiệu quả sản xuất và giảm chi phí lao động, mà còn tăng cường chất lượng sản phẩm và an toàn dây chuyền sản xuất.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
