











Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

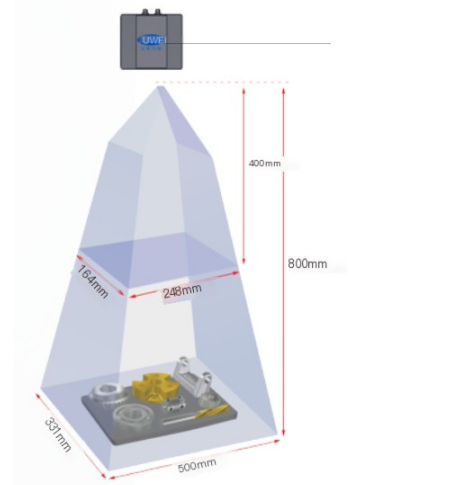
Trong dây chuyền lắp ráp tự động để xử lý kim loại của tấm hợp kim nhôm, độ chính xác của bộ nạp ảnh hưởng trực tiếp đến chất lượng cuối cùng và hiệu quả sản xuất của sản phẩm. Làm thế nào để đảm bảo rằng bộ nạp có thể đặt chính xác phôi ở vị trí được chỉ định trên dây chuyền sản xuất bận rộn đã trở thành một thách thức lớn đối với chúng ta. Hôm nay, chúng tôi sẽ tiết lộ giải pháp hướng dẫn trực quan 3D của chúng tôi, đảm bảo độ chính xác của bộ nạp đạt ± 2 mm với chiều rộng tầm nhìn là 1500mm và độ phân giải camera là 20 triệu.

1 、 Hệ thống tầm nhìn 3D chính xác cao
Thứ nhất, giải pháp của chúng tôi áp dụng một hệ thống tầm nhìn 3D có độ chính xác cao. Hệ thống này sử dụng máy ảnh tốc độ cao và các thuật toán xử lý hình ảnh tiên tiến để thu thập thông tin phôi thời gian thực trên dây chuyền sản xuất và thực hiện tái thiết 3D. Trong một trường chiều rộng xem 1500mm, hệ thống của chúng tôi có thể xác định rõ ràng mọi chi tiết của phôi, cung cấp hỗ trợ dữ liệu chính xác cho vị trí tiếp theo.
2 Tối ưu hóa thuật toán thông minh
Tuy nhiên, chỉ dựa vào các hệ thống hình ảnh có độ chính xác cao là không đủ. Để đảm bảo độ chính xác vị trí của vật liệu đạt đến ± 2 mm, chúng ta cũng cần tối ưu hóa thuật toán. Nhóm R & D của chúng tôi đã thực hiện các điều chỉnh và tối ưu hóa chính xác cho các khía cạnh khác nhau như nhận dạng trực quan, lập kế hoạch đường dẫn và kiểm soát robot thông qua các thử nghiệm và phân tích dữ liệu rộng rãi.
Về mặt nhận dạng trực quan, chúng tôi đã áp dụng các thuật toán trích xuất tính năng nâng cao và phù hợp, có thể xác định chính xác vị trí và tư thế của phôi. Về mặt lập kế hoạch đường dẫn, chúng tôi xem xét các yếu tố khác nhau như quỹ đạo chuyển động của robot, hình dạng và kích thước của phôi, v.v., để đảm bảo rằng robot có thể được đặt dọc theo đường dẫn tối ưu. Về điều khiển robot, chúng tôi sử dụng động cơ và bộ điều khiển servo có độ chính xác cao để đảm bảo robot có thể di chuyển theo đường dẫn và tốc độ đặt trước.
3 Phản hồi và điều chỉnh thời gian thực
Ngoài ra, hệ thống của chúng tôi cũng có khả năng cung cấp phản hồi và điều chỉnh thời gian thực. Trong quá trình đặt robot, hệ thống của chúng tôi liên tục theo dõi vị trí và tư thế của phôi trong thời gian thực và cung cấp lại kết quả giám sát cho hệ thống điều khiển. Nếu có độ lệch giữa vị trí vị trí thực tế và vị trí đặt trước, hệ thống điều khiển sẽ ngay lập tức điều chỉnh robot để đảm bảo độ chính xác vị trí cuối cùng đạt ± 2 mm.
Thông qua giải pháp hướng dẫn trực quan 3D của chúng tôi, chúng tôi đã cải thiện thành công độ chính xác của vị trí trung chuyển trong nhiều doanh nghiệp chế biến kim loại tấm hợp kim nhôm. Trong các ứng dụng thực tế, hệ thống của chúng tôi không chỉ cải thiện hiệu quả sản xuất mà còn làm giảm tỷ lệ khiếm khuyết, mang lại lợi ích kinh tế hữu hình cho doanh nghiệp.
Tóm lại, giải pháp hướng dẫn trực quan 3D của chúng tôi đã cải thiện thành công độ chính xác vị trí của bộ nạp trong xử lý bảng hợp kim nhôm thông qua các hệ thống thị giác có độ chính xác cao, tối ưu hóa thuật toán thông minh và điều chỉnh và điều chỉnh thời gian thực. Trong tương lai, chúng tôi sẽ tiếp tục tối ưu hóa và cải thiện các giải pháp của mình, mang lại các giải pháp xử lý tự động hiệu quả và chính xác hơn cho nhiều doanh nghiệp hơn.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
