










Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

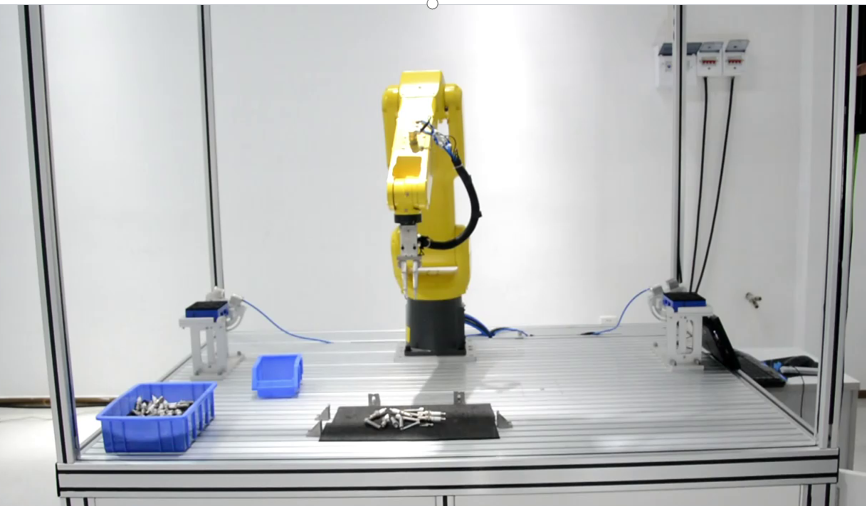
Với sự cải tiến liên tục của tự động hóa sản xuất, một doanh nghiệp phụ tùng ô tô lớn đã đề xuất sự cần thiết phải sử dụng robot composite để hoàn thành phân loại bu lông để cải thiện hiệu quả sản xuất và giảm chi phí lao động. Fuwei thông minh sử dụng robot composite, kết hợp với máy ảnh công nghiệp 3D và bộ điều khiển hiệu suất cao, để đạt được sự nắm bắt bu lông tự động, do đó cải thiện hiệu quả hoạt động tổng thể của dây chuyền sản xuất.
Khó khăn dự án
1. Yêu cầu về độ chính xác cao: Bu lông là các thành phần nhỏ yêu cầu robot xác định chính xác và nắm bắt ổn định, tránh thiệt hại sản phẩm hoặc thời gian ngừng hoạt động.
2. Robot cần thích ứng với các yếu tố động như các vị trí kệ khác nhau và thay đổi điểm hấp dẫn.
3. Trong khi đảm bảo độ chính xác của các thành phần, cần phải tối ưu hóa quy trình vận hành robot và cải thiện hiệu quả hoạt động tổng thể.

Giải pháp
Bằng cách sử dụng máy ảnh công nghiệp 3D và bộ điều khiển hiệu suất cao, robot có thể định vị chính xác các thành phần bu lông và điều chỉnh các chiến lược nắm bắt trong thời gian thực thông qua nhận dạng thị giác, đảm bảo tính ổn định và chính xác.
Bộ điều khiển tích hợp thông minh Fuwei thu thập tín hiệu hội thảo để đạt được sự tích hợp liền mạch giữa robot và dây chuyền sản xuất. Điều khiển đồng thời đa trục, điều chỉnh quỹ đạo linh hoạt theo những thay đổi trong giá vật liệu và các điểm hấp dẫn, thích ứng với môi trường động.
Tối ưu hóa quá trình làm bài tập về nhà, giảm thời gian chờ đợi và cải thiện hiệu quả. Đặt thời gian chu kỳ bài tập về nhà hợp lý và điều chỉnh số lượng lấy và lắp ráp theo nhu cầu để đáp ứng nhu cầu thực tế của dây chuyền sản xuất.
Quá trình hành động:
Sau khi nhận được yêu cầu lấy vật liệu, robot tổng hợp bắt đầu di chuyển đến vị trí sản phẩm được chỉ định. Tiếp theo, robot sẽ thực hiện định vị trực quan để đảm bảo nhận dạng và nắm bắt chính xác của sản phẩm. Trong quá trình định vị, nếu hệ thống phát hiện ra rằng số lượng sản phẩm nhỏ hơn giá trị đã đặt, nó sẽ kích hoạt báo động và cố gắng định vị lại. Nếu định vị thành công, robot sẽ tiếp tục thực hiện các hoạt động nắm bắt; Nếu định vị thất bại, nó sẽ di chuyển đến vị trí của sản phẩm tiếp theo và thử lại. Sau khi nắm bắt thành công, robot sẽ chuyển sản phẩm đến khu vực dỡ tải để hoàn thành hoạt động dỡ tải. Trong toàn bộ quá trình, định vị trực quan và nắm bắt là các bước chính, đảm bảo rằng robot có thể hoàn thành hiệu quả và chính xác các nhiệm vụ tải và dỡ tải.
Ưu điểm kỹ thuật:
Có thể thích nghi với những thay đổi mạnh mẽ trong chiếu sáng môi trường và thay thế lao động thủ công;
Tránh tránh chướng ngại vật robot thông minh và thuật toán lập kế hoạch quỹ đạo dựa trên học tập sâu để phát hiện đối tượng và nội địa hóa;
Có thể thích nghi với các kịch bản trong đó nhiều phôi được sản xuất đồng thời.
Giá trị cốt lõi:
Giảm chi phí và tăng hiệu quả, cải thiện sự ổn định, nhanh chóng đưa vào sản xuất với hoạt động đơn giản và nhanh chóng thích ứng với các sản phẩm mới.
Kế hoạch này sẽ cải thiện đáng kể hiệu quả hoạt động của dây chuyền sản xuất. Trong khi đó, thông qua công nghệ định vị và nắm bắt chính xác, nguy cơ thiệt hại sản phẩm và thời gian ngừng hoạt động có thể giảm, cải thiện chất lượng sản phẩm và sự ổn định sản xuất. Ngoài ra, khả năng thích ứng với môi trường động và kiểm soát tốc độ hiệu quả sẽ tăng cường hơn nữa tính linh hoạt và tốc độ phản ứng của dây chuyền sản xuất, đáp ứng nhu cầu sản xuất liên tục của GAC Toyota.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
