











Mã QR

Về chúng tôi
Các sản phẩm
Liên hệ chúng tôi

Điện thoại

E-mail

Địa chỉ
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc

Chúng tôi đề xuất một giải pháp dựa trên hướng dẫn tầm nhìn 3D để đáp ứng các yêu cầu tự động hóa đối với quá trình đánh răng, sấy, tải và dỡ tải của các tấm hợp kim nhôm. Giải pháp này đạt được sự công nhận và định vị chính xác cao của các bảng bằng cách giới thiệu công nghệ tầm nhìn 3D tiên tiến, do đó cải thiện hiệu quả sản xuất và sự ổn định chất lượng.
Tổng quan về kế hoạch
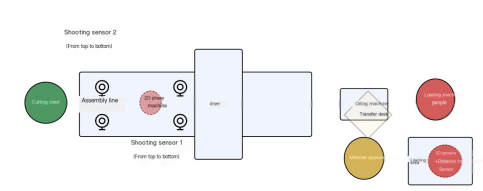
Kế hoạch này đạt được xác định chính xác và định vị các tấm hợp kim nhôm bằng cách định cấu hình các hệ thống tầm nhìn 3D trong các khu vực tải và dỡ tải tương ứng. Khu vực cho ăn áp dụng phương pháp cho ăn hút để đảm bảo rằng các bảng vào dây chuyền sản xuất trơn tru và chính xác. Khu vực dỡ tải được tự động hóa bởi robot để lấy và đặt bảng. Đồng thời, để đảm bảo rằng quá trình bôi dầu không tiếp xúc với mặt trước của sản phẩm, chúng tôi đã thiết kế thiết bị bôi dầu như một phương pháp bôi dầu bên hoặc trên cùng.
Thực hiện kế hoạch
Thực hiện khu vực tải
Trong khu vực tải, chúng tôi đã cài đặt một hệ thống tầm nhìn 3D bao gồm camera có độ phân giải cao và đơn vị xử lý hình ảnh. Khi cảm biến phát hiện phôi, máy ảnh ngay lập tức chụp ảnh và truyền dữ liệu hình ảnh đến bộ xử lý hình ảnh. Đơn vị xử lý hình ảnh xử lý hình ảnh thông qua các thuật toán, trích xuất thông tin đường viền và vị trí của bảng và tính toán giá trị Y1 của bảng. Sau đó, dựa trên giá trị Y1, thiết bị hút được điều khiển để hút chính xác tấm và đưa nó vào dây chuyền sản xuất.
Thực hiện khu vực dỡ tải
Trong khu vực dỡ hàng, chúng tôi cũng đã trang bị hệ thống tầm nhìn 3D và robot có chức năng nắm và vị trí có độ chính xác cao. Khi cảm biến 1 phát hiện phôi, máy ảnh chụp ảnh và cung cấp giá trị Y1 của sản phẩm 1; Sau đó, khi cảm biến 2 phát hiện phôi, robot nắm bắt chính xác sản phẩm 1 dựa trên giá trị Y1 và đặt nó ở vị trí được chỉ định. Tương tự, khi cảm biến phát hiện lại phôi và cung cấp giá trị Y2 của sản phẩm 2, robot thực hiện các hoạt động nắm và vị trí một lần nữa. Trong suốt quá trình, chúng tôi đã tối ưu hóa các thuật toán và tham số camera được hiệu chỉnh để đảm bảo độ chính xác của vị trí đáp ứng yêu cầu ± 2 mm.

Giải pháp:
Chúng tôi đã thực hiện các biện pháp sau đây để giải quyết độ khó của việc đạt được độ chính xác của vị trí ± 2 mm cho bộ nạp:
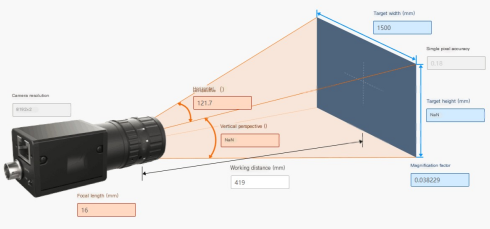
Cải thiện độ phân giải camera và trường chiều rộng xem: Chọn camera độ phân giải cao hơn để tăng độ chính xác của dữ liệu hình ảnh; Đồng thời, điều chỉnh trường máy ảnh chiều rộng xem theo tình huống thực tế của dây chuyền sản xuất để đảm bảo phạm vi bảo hiểm của toàn bộ quy trình công việc.
Tối ưu hóa các thuật toán xử lý hình ảnh: Bằng cách tiến hành nghiên cứu chuyên sâu về các đặc điểm và kết cấu bề mặt của các bảng hợp kim nhôm, tối ưu hóa các thuật toán xử lý hình ảnh để cải thiện độ chính xác của nhận dạng đường viền và tính toán vị trí.
Hiệu chuẩn chính xác của các tham số robot: Hiệu chỉnh chính xác robot, bao gồm các tham số như độ dài và góc khớp của cánh tay robot, để đảm bảo độ ổn định và độ chính xác cao trong quá trình nắm và hoạt động vị trí.
Giải pháp này đạt được tự động hóa hiệu quả quá trình đánh răng, sấy, tải và dỡ các tấm hợp kim nhôm bằng cách giới thiệu công nghệ 3D Vision. Bằng cách tối ưu hóa các thuật toán và hiệu chỉnh chính xác các tham số thiết bị, chúng tôi đã giải quyết thành công vấn đề độ chính xác của vị trí trung chuyển, cải thiện hiệu quả sản xuất và độ ổn định chất lượng.
Số 22, Đường Hongyuan, Quảng Châu, tỉnh Quảng Đông, Trung Quốc
